Amortissement RC virtuel des convertisseurs de source de tension filtrés par LCL avec compensation harmonique sélective étendue (projet électrique)
- in Autre Projet
->
ABSTRAIT
L’amortissement actif et la compensation harmonique sont deux défis courants auxquels sont confrontés les convertisseurs de source de tension filtrés LCL. Pour les gérer de manière holistique, ce papier commence par proposer un amortisseur RC virtuel en parallèle avec le condensateur de filtre passif.
L’amortisseur virtuel est activement inséré en renvoyant le courant du condensateur passif à travers un filtre passe-haut, qui indirectement, fournit deux caractéristiques supérieures. Il s’agit de l’atténuation du retard de phase subi par un amortisseur conventionnel et de la prévention de l’instabilité causée par la résistance négative insérée involontairement.
De plus, avec l’amortisseur RC virtuel, la région de fréquence, dans laquelle la compensation harmonique est efficace, peut être étendue au-delà de la fréquence de croisement de gain. Ceci est intéressant pour certaines applications hautes performances, mais n’a pas été atteint actuellement par les systèmes existants. Les performances du schéma proposé ont été testées en laboratoire avec des résultats obtenus pour démontrer la stabilité et la compensation harmonique.
DESCRIPTION DU SYSTÈME
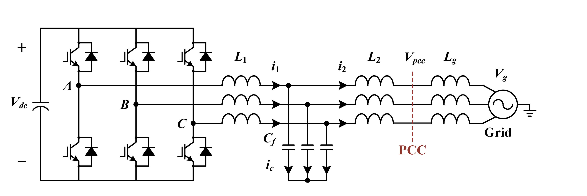
Fig. 1. Convertisseur de source de tension triphasé connecté au réseau avec un LCL filtre
La figure 1 montre un convertisseur de source de tension triphasé connecté au réseau avec un filtre LCL, dont les paramètres utilisés pour la conception sont résumés dans le tableau I. Pour plus de simplicité, la tension de liaison CC Vdc du convertisseur peut être traitée comme constante, tandis que sa largeur de bande de synchronisation de grille peut être supposée inférieure à la fréquence fondamentale de grille pour éviter une instabilité involontaire des basses fréquences. Cette structure a déjà été montré par avoir un effet d’amortissement inhérent même lorsqu’une seule boucle de commande est utilisée pour réguler le courant de réseau i2.
La seule condition exigée est que la fréquence de résonance LCL soit placée au-dessus d’un sixième de la fréquence de commande du système fs/ 6, qui dans, est appelée fréquence critique. Cette région n’est cependant pas attractive en raison de son filtrage harmonique de commutation plus faible, qui en général, compromet l’objectif d’avoir un filtre LCL. De plus, la grande variation de l’impédance de la grille dans les réseaux faibles peut déplacer la fréquence de résonance LCL dans un large spectre sur fs/ 6, donnant lieu à une instabilité si aucun amortissement actif externe n’est utilisé.
AMORTISSEUR RC VIRTUEL PROPOSÉ
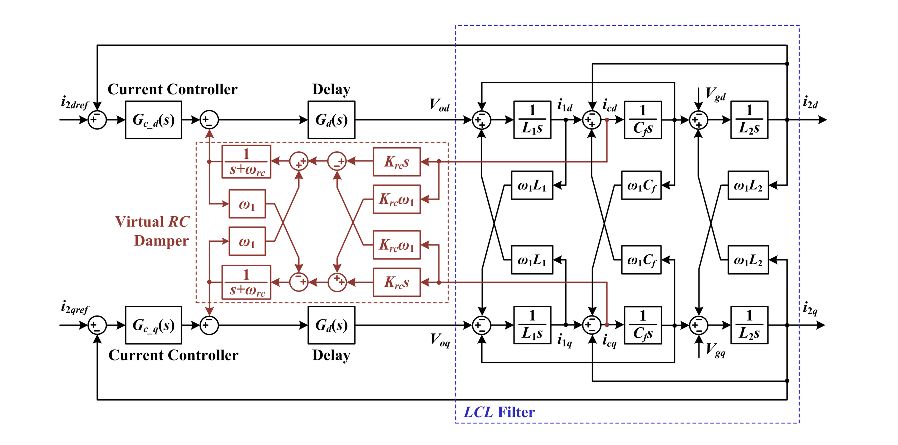
Fig. 11. Schéma fonctionnel de l’amortisseur RC virtuel proposé dans le châssis synchrone
La fonction de transfert de l’amortisseur RC résultant dans le cadre synchrone est donc donnée par la deuxième expression de (11), dont la mise en œuvre implique un couplage croisé, et est donc plus complexe comme le montre la figure 11. Réalisation et analyse de l’amortisseur à l’arrêt cadre est donc généralement recommandé pour des raisons de simplicité.

COMPENSATION HARMONIQUE SÉLECTIVE
La compensation harmonique sélective est effectuée en plaçant des pics de résonance à des fréquences identifiées pour la compensation. Elle peut être effectuée dans la trame synchrone ou stationnaire. Pour ces derniers, plusieurs contrôleurs résonnants sont couramment utilisés, qui pour les convertisseurs filtrés en L, se sont avérés compenser les harmoniques jusqu’à la fréquence de Nyquist, après avoir introduit la discrétisation et la compensation de phase nécessaires. Les contrôleurs résonants discrétisés résultants sont décrits ci-après, avant de discuter de la manière dont leur plage de fréquences de compensation harmonique doit être choisie pour les convertisseurs filtrés LCL.
RÉSULTATS EXPÉRIMENTAUX
Pour vérifier l’analyse présentée, le convertisseur filtré LCL illustré sur la figure 1 est mis en œuvre et connecté à une alimentation en courant alternatif de la série MX de California Instruments pour émuler le réseau. Les paramètres choisis pour le convertisseur ont été énumérés dans le tableau I, à partir duquel les paramètres résumés dans le tableau II sont conçus pour l’amortisseur RC et les contrôleurs de courant de résonance, à la suite de la discussion présentée dans le document. Le schéma de contrôle résultant est réalisé avec un système dSPACE DS1006, dont les résultats produits sont expliqués comme suit.
A. Amortissement actif
Compensation harmonique sélective
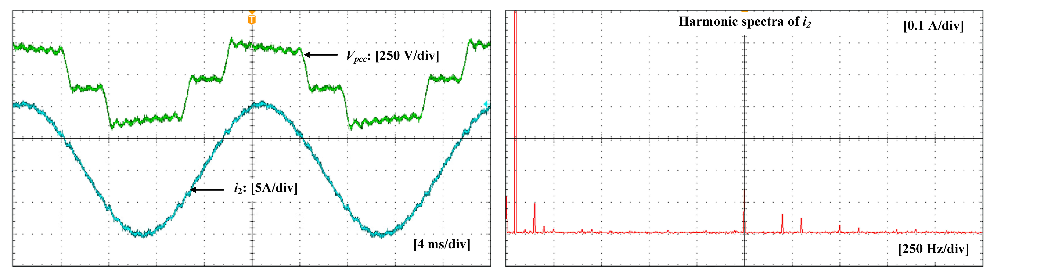
Fig. 19. Tension PCC et courant de réseau mesurés par phase avec une fréquence de coupure élevée pour le registre RC virtuel
CONCLUSION
Cet article présente une analyse holistique de l’amortissement actif et de la compensation harmonique sélective pour les convertisseurs filtrés LCL connectés au réseau. Les résultats expérimentaux obtenus montrent que l’amortisseur RC virtuel proposé amortit bien la résonance LCL avec les influences d’instabilité, causées par les retards du système, atténuées rapidement. Le système amorti, à son tour, permet d’étendre la compensation harmonique jusqu’à la résonance LCL, plutôt que la fréquence de croisement du gain. Cette attente a été vérifiée par trois cas expérimentaux, dans lesquels les termes de résonance les plus élevés ont été placés près de leurs fréquences de résonance LCL respectives. Des directives de conception appropriées sont également données, qui, une fois suivies, aboutissent à des convertisseurs avec une meilleure robustesse et moins d’harmoniques, même si l’inductance du réseau varie considérablement.
Source: IEEE
Auteurs: Xiongfei Wang | Frede Blaabjerg | Poh Chiang Loh
>> Documents de base des projets Matlab simples pour les étudiants en génie
>> Meilleures idées de projet Matlab pour les étudiants en génie avec des matériaux de projet complets
>> Projets Simulink utilisant Matlab pour les étudiants en génie
>> Plus de 200 projets Matlab basés sur un système de contrôle pour les étudiants de dernière année