Évaluations de la rugosité par balayage laser terrestre pour les infrastructures (projet civil)
- in Autre Projet
->
ABSTRAIT:
La rugosité des routes est un paramètre clé pour contrôler les processus de construction de chaussées et pour évaluer la qualité de roulement des routes pavées et non pavées. Ce papier décrit des algorithmes utilisés dans le traitement de nuages de points à balayage laser terrestre stationnaire (STLS) tridimensionnel (3D) pour obtenir des cartes de surface d’indices ponctuels qui caractérisent la rugosité de la chaussée.
L’épine dorsale de l’analyse est une simulation de modèle de quart de voiture sur une grille de maillage 3D spatiale représentant la surface de la chaussée. Deux études de cas sont présentées et les résultats montrent une grande variabilité spatiale des indices de rugosité à la fois longitudinalement et transversalement (c.-à-d. Différentes positions de trajectoire de roue).
Il est proposé que la caractérisation de la rugosité de la route à l’aide d’un cadre spatial fournisse plus de détails sur la gravité et l’emplacement des caractéristiques de rugosité par rapport aux méthodes unidimensionnelles. Cet article décrit des approches qui fournissent un cadre algorithmique pour d’autres collectant des données spatiales STLS 3D similaires à utiliser dans la caractérisation avancée de la rugosité des routes.
COLLECTE DE DONNÉES À L’AIDE DU SCANNER LASER STATIONNAIRE
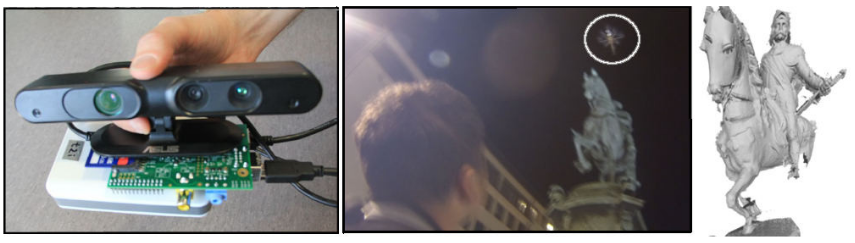
Les systèmes LIDAR mesurent les informations (coordonnées spatiales et couleur) d’un espace 3D et stockent les informations dans un nuage de points 3D. Le terme LIDAR est générique et comprend les technologies de balayage laser aéroportées, les scanners mobiles montés sur les véhicules et les scanners laser fixes ou les scanners laser terrestres stationnaires (STLS), où le scanner laser est fixé à une station avec des coordonnées connues et basé sur la distance entre le scanner et les points détectés, un nuage de points 3D référencé géospatialement est construit.
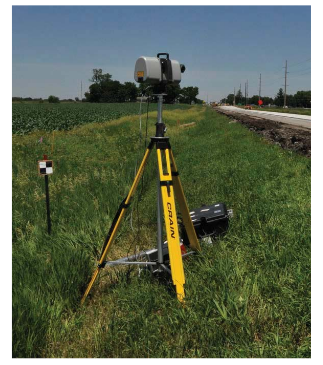
Le système Trimble CX 3D STLS a été utilisé dans deux études de cas pour acquérir des scans laser 3D. La précision de position d’un point unique est de 4,5 mm à 30 m et chute à 7,3 mm à 50 m. La précision de la distance est de 1,2 mm à 30 m et chute à 2 mm à 50 m. La figure 1 montre la configuration du scanner.
Configuration du scanner laser Trimble CX 3D.
TRAITEMENT DE L’INFORMATION
Algorithmes de vision:
Pour utiliser la surface de la route dans des simulations, les algorithmes développés nécessitent une grille uniformément espacée dans la direction longitudinale. Pour y parvenir, une grille maillée est formée avec des éléments de grille qui ont des dimensions d’arête x et y prédéfinies. L’élévation du centre de la grille est calculée comme la moyenne de tous les points de nuage tombant dans cette région de la grille.
Tous les points sont tournés et traduits en un système de coordonnées local correspondant aux axes longitudinal et transversal (Zalama et al. 2011). La transformation pour le traitement le long de courbes horizontales peut être réalisée en construisant un système de coordonnées local curvilinéaire; cependant, pour des géométries simples sans courbes, le nuage de points est tourné globalement, où l’axe x correspond à la direction longitudinale et l’axe y à la direction transversale.
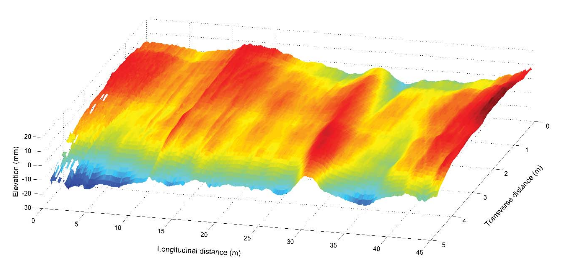
Données de nuage de points après traitement dans l’algorithme de vision pour une section de chaussée.
Algorithmes d’évaluation de la rugosité:
L’évaluation de la rugosité décrite ici est basée sur les réponses du modèle quart de voiture décrit dans (ASTM E1926-08). La figure 5 présente un schéma du modèle quart de voiture. Où Ms et Mu sont respectivement les masses suspendues et non suspendues, ks et kt sont respectivement les coefficients de suspension et de ressort du pneumatique, et cs est le taux d’amortissement de la suspension.
ÉTUDES DE CAS
La rugosité de la route de deux tronçons de route a été évaluée, les tronçons comprennent une route rurale non pavée de 55 m de long et un revêtement HMA de 58,8 m de long sur une chaussée en béton uni jointé (JPCP). Les figures 6a et 6b montrent la carte de pente rectifiée pour la route rurale et la route goudronnée respectivement.
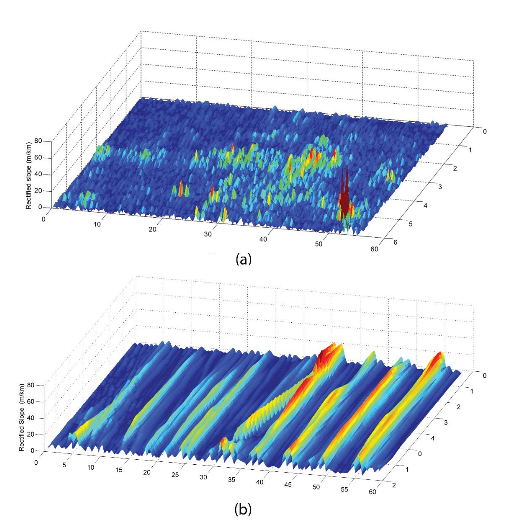
Cartes de surface de pente rectifiée absolue pour (a) routes non revêtues et (b) routes revêtues.
RÉSUMÉ ET CONCLUSIONS
Cet article présente le cadre des techniques quantitatives d’évaluation de la rugosité de surface des routes pavées et non pavées. Les méthodes d’évaluation de la rugosité de surface peuvent être définies en deux catégories principales, la simulation par différence finie et l’analyse du domaine fréquentiel. Les principales conclusions de cette recherche sont:
- Le balayage laser terrestre est une technologie prometteuse pour évaluer une gamme de surface
conditions des routes non goudronnées. - Des cartes de rugosité de surface 2D ont été développées en utilisant les informations obtenues à partir du scanner laser.
- Les algorithmes utilisés pour produire des cartes de rugosité 2D sont semi-automatisés et
les développements devraient introduire des algorithmes entièrement automatisés capables de traiter les données directement après la numérisation. - Les valeurs IRI sont très variables sur le tronçon de route, il est donc difficile de définir
profil approprié à utiliser comme profil représentatif. - La technique d’analyse proposée peut être utilisée pour identifier des caractéristiques approximatives localisées.
- Les simulations de différences finies ne conviennent pas aux profils courts.
- Le filtrage des profils dans l’espace de Fourier en tant qu’outil pour obtenir les cartes de rugosité spatiale est plus approprié que les algorithmes de différences finies pour analyser les profils courts, mais l’analyse d’ondelettes fournit une approche plus robuste pour analyser les profils courts et identifier les caractéristiques localisées.
- À ce stade, les balayages laser terrestres à haute résolution prennent du temps et nécessitent
personnel entraîné; cependant, les scanners laser terrestres plus récents pourront réduire considérablement le temps d’acquisition des données grâce à des vitesses de balayage plus rapides et des portées plus longues.
Source: Université d’État de l’Iowa
Auteurs: Ahmad A. Alhasan | David J. White