SVANET: un réseau ad hoc de véhicules intelligents pour une transmission de données efficace avec des capteurs sans fil (projet électrique / électronique)
- in Autre Projet
->
ABSTRAIT
Les capteurs sans fil peuvent détecter tout événement, comme les accidents, ainsi que les routes verglacées, et peuvent transmettre les messages de sauvetage / d’avertissement via des véhicules intermédiaires pour toute aide nécessaire. Dans cet article, nous proposons une architecture de réseau ad hoc de véhicules intelligents (SVANET) qui utilise des capteurs sans fil pour détecter les événements et les véhicules pour transmettre efficacement les messages de sécurité et de non-sécurité en utilisant différents canaux de service et un canal de contrôle avec des priorités différentes.
Nous avons développé un protocole de transmission de données pour les véhicules sur l’autoroute, dans lequel les données peuvent être transmises à l’aide de véhicules s’ils sont connectés les uns aux autres ou les données peuvent être transmises à l’aide de capteurs sans fil à proximité. Notre protocole de transmission de données est conçu pour augmenter la sécurité de conduite, pour prévenir les accidents et pour utiliser efficacement les canaux en ajustant dynamiquement les intervalles de temps des canaux de commande et de service.
De plus, notre protocole peut transmettre des informations aux véhicules à l’avance, afin que les conducteurs puissent décider d’un itinéraire alternatif en cas de congestion du trafic. Pour divers partages de données, nous concevons une méthode permettant de sélectionner quelques nœuds leaders parmi les véhicules circulant le long d’une autoroute pour diffuser efficacement les données. Les résultats de la simulation montrent que notre protocole peut surpasser la norme existante en termes de taux de livraison de paquets de bout en bout et de latence.
TRAVAUX CONNEXES
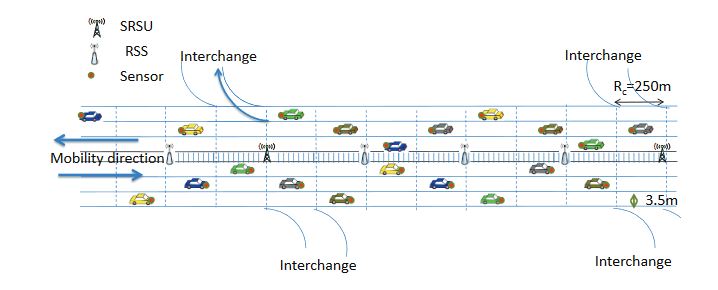
Figure 3. Architecture de réseau ad hoc hybride pour véhicules intelligents (SVANET) proposée
Il est supposé que IEEE 802.11p et IEEE 802.15.4 coexistent dans chaque SRSU, et par conséquent, chaque RSS peut transmettre des données au SRSU en utilisant le protocole de communication IEEE 802.15.4. Afin de rendre l’architecture économiquement réalisable, aucune connexion par câble ou sans fil n’est nécessaire entre deux SRSU quelconques, car ils peuvent recevoir des informations sur les événements des véhicules, ainsi que des RSS pour améliorer la fiabilité des données. N’importe quelle SOBU peut communiquer avec d’autres SOBU en utilisant le protocole de communication IEEE 802.11p. L’architecture proposée pour le scénario routier est illustrée à la figure 3.
PROTOCOLE DE TRANSMISSION DE DONNÉES DANS SVANET
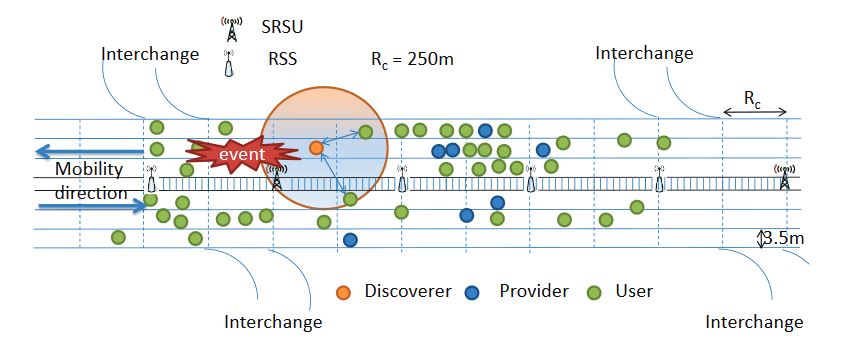
Figure 5. Exemple de phase de diffusion d’événements
Les découvertes – les véhicules détectant un événement lié à un message d’avertissement – doivent envoyer le message à la SRSU qui se trouve à l’échangeur précédent de l’emplacement de l’événement. Par exemple, le SRSU sera le SRSU le plus à droite de la figure 5. C’est parce que nous voulons avertir les véhicules qui arrivent, qui ont le choix de quitter l’autoroute par l’échangeur pour éviter les embouteillages.
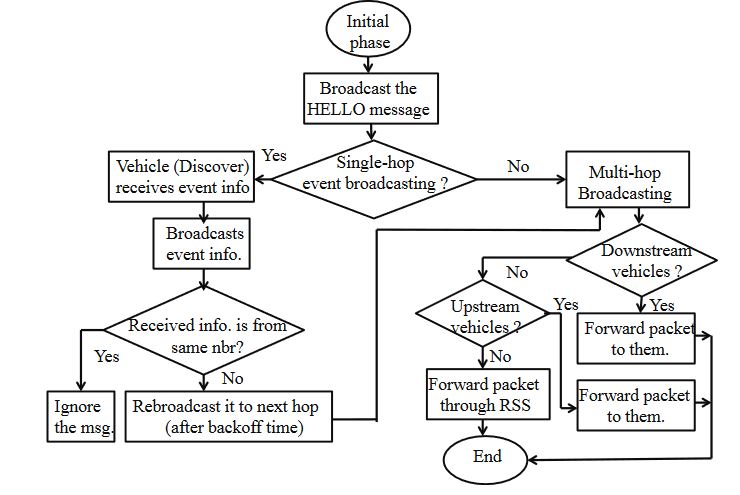
Figure 7. Organigramme du protocole de transmission de données dans SVANET
Le temps d’attente moyen pour les véhicules se déplaçant dans la direction opposée peut être calculé par l’équation (6). Enfin, le message peut être exécuté par les véhicules se déplaçant dans la direction opposée et est transmis au SRSU suivant par plusieurs bonds. En plus de cette méthode, nous pouvons utiliser des RSS pour transmettre le message dans la zone de brèche, et le temps de diffusion du message peut être calculé par l’équation (2), la même équation utilisée dans le cas A, en prenant en compte les véhicules intermédiaires et les RSS comme les sauts requis. Le flux complet de notre protocole de transmission de données proposé est illustré par le diagramme de transition d’état, comme indiqué dans la figure 7.
SÉLECTION DU LEADER À SVANET
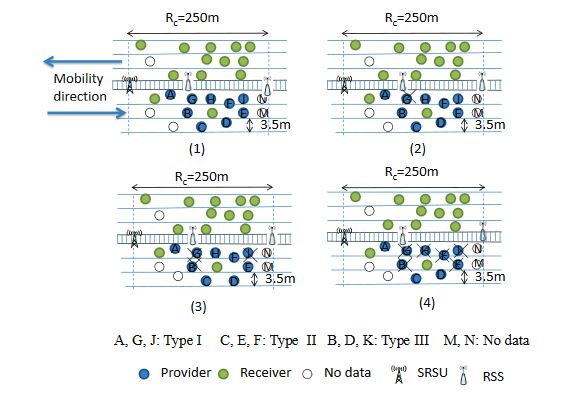
Figure 8. Sélection des dirigeants avec différents types de données
Cependant, les fournisseurs ayant différents types de données à partager avec d’autres ignoreront ce message de sélection de leader. Ils continuent à diminuer leur minuterie d’arrêt et diffusent le message de sélection du leader avec leur type de données. Le nœud qui diffuse le premier message de sélection de leader se considère comme le leader après un certain intervalle de temps prédéfini. Cette procédure se poursuit jusqu’à ce que les leaders pour ces trois types de données soient sélectionnés. Comme le montre la figure 8 (1), nous considérons que tous les véhicules sont à portée de communication et se déplacent dans la même direction.
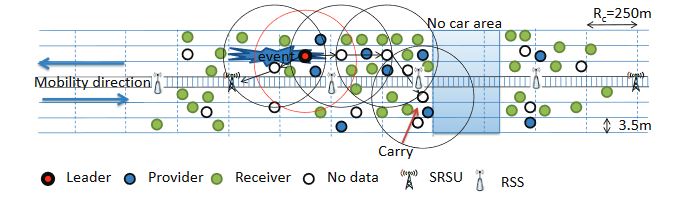
Figure 12. Sélection du prochain leader lorsque le réseau est partitionné
Si aucun véhicule n’est à portée de communication des autres et que le réseau est partitionné, alors le leader existant doit transporter les données jusqu’à ce qu’elles se trouvent à portée de communication d’un autre véhicule, comme le montre la Figure 12. Cependant, les informations d’événement peuvent être transmises. via le RSS au SRSU, bien que les données ne puissent pas être transmises. Si le prochain leader sélectionné n’est pas destiné à transmettre les données d’événement, alors le nouveau leader est sélectionné en fonction des besoins des données.
ÉVALUATION DES PERFORMANCES
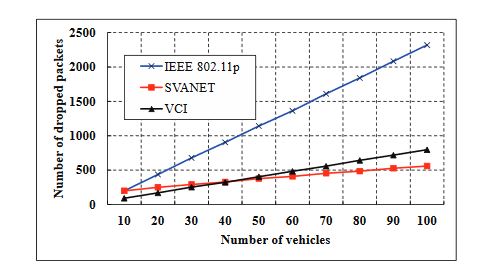
Figure 13. Le nombre de paquets abandonnés au SRSU, lorsque l’intervalle CCH est compris entre 50 ms et 100 ms
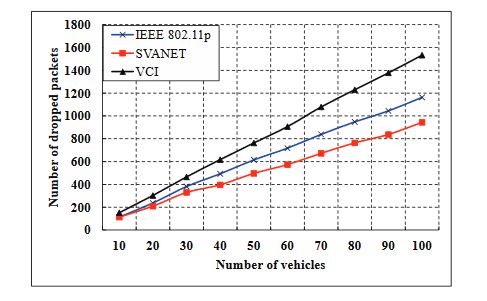
Figure 14. Le nombre de paquets abandonnés au SRSU lorsque l’intervalle CCH est compris entre 1 ms et 100 ms
Les résultats de la simulation sont présentés sur les figures 13 et 14, où l’intervalle CCH est compris entre 50 ms et 100 ms et entre 1 ms et 100 ms, respectivement. Sur la figure 13, nous constatons que le nombre de paquets abandonnés dans la norme est supérieur au VCI et SVANET. Comme la durée de l’intervalle CCH dans la norme est fixe, il ne peut pas terminer toutes les transmissions de paquets. Dans ce cas, le nombre de paquets abandonnés du VCI est inférieur à notre protocole lorsque le nombre de nœuds est inférieur à 40.
CONCLUSIONS
Dans cet article, un protocole de transmission de données pour transmettre différents types de données est proposé. Une architecture VANET hybride différente de la recherche existante est proposée pour former un réseau ad hoc de véhicules intelligents avec un nombre limité de capteurs et d’éviers en bord de route. Pour résoudre le problème existant de la transmission et du partage de données, nous proposons l’idée d’intégrer le VANET avec des capteurs sans fil bon marché.
Les nœuds de capteurs sont installés dans les véhicules et les puits de bord de route déployés le long du bord de la route pour détecter tout type de conditions routières et pour tamponner et transmettre des messages à d’autres véhicules, quelle que soit la densité ou la connectivité du VANET. Dans cet article, nous étudions ces défis et proposons des schémas pour des interactions véhicule-capteur et capteur-capteur efficaces et efficientes. Un mécanisme de communication multicanal entre les capteurs et les véhicules est proposé dans notre SVANET, dans lequel les MAC IEEE 802.15.4 et IEEE 802.11p sont utilisés.
En outre, basé sur la norme IEEE 1609.4, un protocole de réglage de canal dynamique est conçu, qui peut ajuster l’intervalle entre CCH et SCH pour transmettre des messages efficacement. Afin d’améliorer le taux de livraison des données et la fiabilité de la transmission des données, un algorithme de sélection de leader parmi les véhicules est proposé, de sorte que différents types de données, telles que la vidéo, l’audio et le texte, puissent être transmis aux passagers avec d’autres véhicules en fonction de leur intérêt. Sur la base de notre méthode, les dirigeants peuvent transmettre les données aux SRSU et aux véhicules via les SRSU et les RSS.
Étant donné que les conducteurs peuvent obtenir à l’avance les informations sur les événements, telles que l’état des routes verglacées, les lieux des accidents et les embouteillages, ils peuvent trouver d’autres itinéraires pour sortir par les échangeurs à proximité. Nous avons développé des algorithmes pour ajuster dynamiquement les intervalles CCH et SCH et avons comparé les performances de notre protocole avec la norme IEEE 802.11p. Le SVANET proposé peut être économiquement réalisable car il y a un petit nombre d’unités en bord de route et de capteurs utilisés pour améliorer le rapport moyen de livraison de données quel que soit le nombre de véhicules dans chaque voie sur la route.
Source: Université de Chang Gung
Auteurs: Prasan Kumar Sahoo | Ming-Jer Chiang | Shih-Lin Wu