Une nouvelle application de robotique de service basée sur le cloud pour la surveillance de l’environnement des centres de données (projet informatique)
- in Autre Projet
->
ABSTRAIT
Ce travail présente une application robotique visant à effectuer une surveillance environnementale dans les centres de données. En raison de la densité d’énergie élevée gérée dans les centres de données, la surveillance de l’environnement est cruciale pour contrôler la température et l’humidité de l’air partout l’ensemble de l’environnement, afin d’améliorer l’efficacité énergétique, d’éviter les pannes matérielles et de maximiser le cycle de vie des appareils informatiques.
Les solutions de pointe pour la surveillance des centres de données sont aujourd’hui basées sur des réseaux de capteurs environnementaux, qui collectent en permanence des données de température et d’humidité. Ces solutions sont encore coûteuses et ne s’adaptent pas bien aux grands environnements. Cet article présente une alternative aux réseaux de capteurs environnementaux qui repose sur des robots mobiles autonomes équipés de capteurs environnementaux. Les robots sont contrôlés par une plate-forme de robotique cloud centralisée qui permet une navigation autonome et fournit une interface utilisateur client à distance pour la gestion du système.
Du point de vue de l’utilisateur, notre solution simule un réseau de capteurs environnementaux. Le système peut être facilement reconfiguré afin de s’adapter aux exigences de gestion et aux changements dans la configuration du centre de données. Pour cette raison, il est appelé le réseau de capteurs virtuels. Cet article discute des choix d’implémentation en ce qui concerne les exigences particulières de l’application et présente et discute les données collectées lors d’une expérience à long terme dans un scénario réel.
LA SOLUTION PROPOSÉE
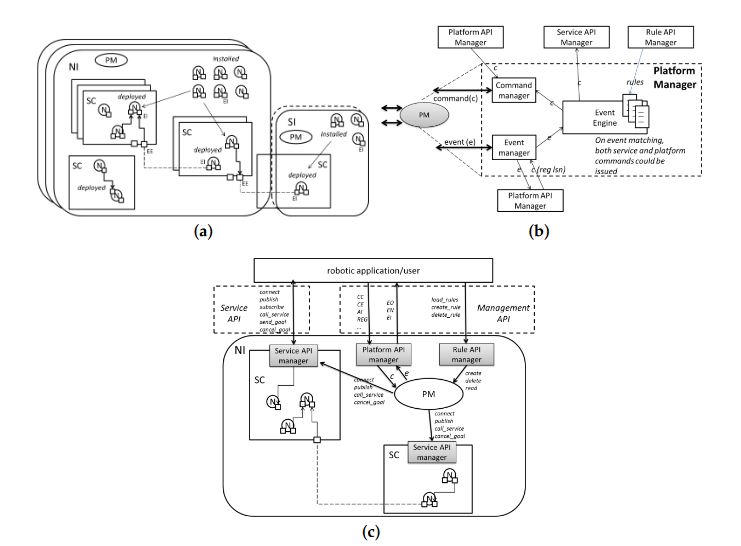
Figure 2. La plate-forme de robotique cloud développée par TIM. (a) Les objets de la plateforme et leurs relations; (b) l’architecture logique du gestionnaire de plateforme
La plateforme de robotique cloud garantit la robustesse des applications à long terme: elle stocke l’état de chaque nœud ROS dans l’application et est capable de redémarrer les nœuds qui plantent. La plate-forme est également consacrée à répartir la charge de calcul entre les sites distants, offrant de meilleures performances de calcul que le PC embarqué du robot. Les éléments de base de la plate-forme cloud sont illustrés à la figure 2a et répertoriés ci-dessous.
LA COUCHE DE NAVIGATION
Selon la section 2.2, la couche de navigation regroupe toutes les capacités qui permettent un mouvement de robot complètement autonome dans l’environnement. Les principales capacités sont la cartographie, la localisation et la planification des chemins (section 3.1). La couche de navigation fonctionne comme un intermédiaire entre la couche matérielle (c’est-à-dire le robot lui-même) et la couche application. Il reçoit les objectifs cibles et contrôle le robot pour atteindre chaque objectif de manière autonome et en toute sécurité.
COUCHE D’APPLICATION
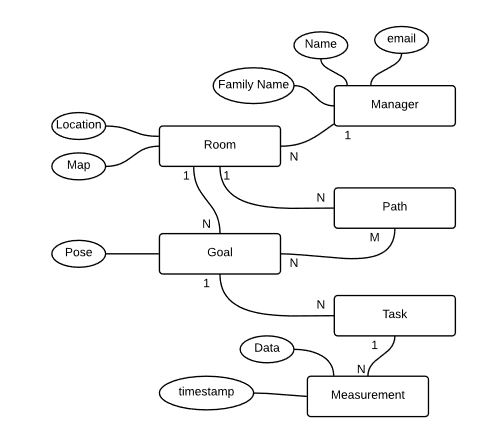
Figure 4. La structure de la base de données utilisée dans le système proposé. Les rectangles représentent des tables et les ellipses représentent les données associées à chaque table
Les données collectées par le service sont stockées dans une base de données structurée comme le montre la figure 4. La base de données est composée de quatre tables principales, à savoir la salle, l’objectif, la tâche et le plan. La table de salle modélise une salle de serveurs. Il regroupe des informations générales (par exemple, des informations sur le responsable de salle) et des informations spécifiques à l’application, qui sont la carte, une liste d’entrées d’objectifs et une liste d’entrées de plan. La table des objectifs modélise une pose 2D avec un ensemble d’entrées de tâches associé.
EXPÉRIENCES ET RÉSULTATS
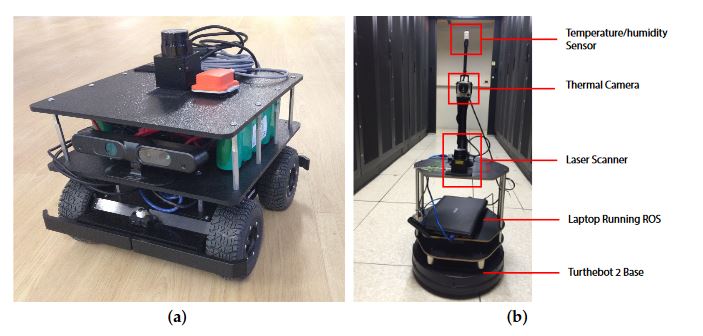
Figure 6. Les deux prototypes de plates-formes matérielles. (a) La plateforme Coware Corob Classic 4 WD
Pour démontrer l’utilité de la plate-forme de robot cloud dans l’abstraction de la couche matérielle et pour être compatible avec différentes plates-formes de robot, nous avons d’abord testé notre système sur du matériel de deux fournisseurs différents: un rover Coroware Corobot Classic 4WD doté d’un télémètre laser Hokuyo 04LX, une unité de mesure inertielle XSens MTi (IMU) (Figure 6a) et une plate-forme robotique Turtlebot 2 dotée d’un télémètre laser Hokuyo 04LX (Figure 6b). Veuillez noter que la plateforme Turtlebot 2 est équipée en interne d’un capteur IMU. Les deux plates-formes étaient équipées d’un PC exécutant Ubuntu Linux et ROS.
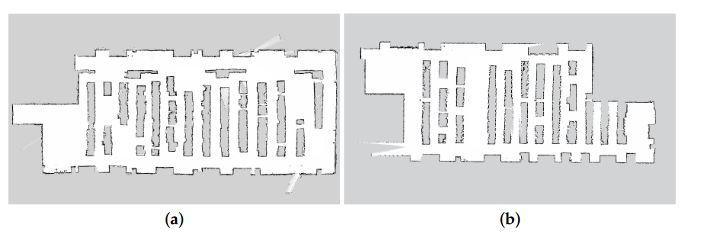
Figure 8. Les deux cartes créées avec la procédure de mappage
L’étape de cartographie a été exécutée dans toutes les salles du centre de données où nous avons utilisé le robot. Dans la figure 8, nous rapportons les cartes créées dans la salle 1 et la salle 2 du centre de données de Rozzano. Les deux cartes ont été créées en environ 30 minutes en télé-opérant manuellement le robot. La résolution de la carte est de 0,05 m / pixel.
CONCLUSIONS
Dans cet article, nous avons présenté une application de robotique de service pour résoudre le problème de la surveillance environnementale des centres de données. Notre solution repose sur un framework de robotique cloud basé sur le Robot Operating System (ROS) et simule un ESN. Au lieu d’utiliser plusieurs capteurs fixes (nœuds), quelques capteurs montés sur une base mobile autonome suffisent pour atteindre chaque point de l’environnement et donner des mesures localisées.
Nous avons appelé ce système un réseau de capteurs virtuels (VSN). Nous avons décrit l’architecture générale de la plateforme de robotique cloud et comment nous avons appliqué cette technologie dans une véritable application de robotique de service. Ensuite, nous avons décrit l’application elle-même et nos choix liés à la navigation du robot et à l’application de surveillance.
Enfin, nous avons montré les résultats de plusieurs expériences afin de valider la capacité de la solution proposée à naviguer de manière autonome dans l’environnement (à l’aide de deux plates-formes matérielles robotiques différentes) et de tester l’application dans des scénarios de cas réels. La collecte de données et l’analyse thermographique effectuées à l’intérieur de la salle du centre de données du Politecnico di Torino ont mis en évidence certains problèmes concernant le contrôle et l’isolation de l’humidité, qui pourraient être signalés à la direction du centre de données pour action.
Source: Université d’État de l’Iowa
Auteurs: Ludovico Orlando Russo | Stefano Rosa | Marcello Maggiora | Basilio Bona