Système sensoriel basé sur un mini-UAV pour mesurer les variables environnementales dans les serres (projet électrique / électronique)
- in Autre Projet
->
ABSTRAIT
Cet article décrit la conception, la construction et la validation d’une plate-forme sensorielle mobile pour la surveillance des serres. Le système complet consiste en un système sensoriel à bord d’un petit quadrirotor (c’est-à-dire un mini-UAV à quatre rotors). Les objectifs de ce système comprennent prendre des mesures de température, d’humidité, de luminosité et de concentration de CO2 et tracer des cartes de ces variables.
Ces caractéristiques pourraient potentiellement permettre le contrôle du climat, la surveillance des cultures ou la détection des défaillances (par exemple, une rupture dans un couvercle en plastique). Les capteurs ont été sélectionnés en considérant les modèles de climat et de croissance des plantes et les exigences de leur intégration à bord du quadrirotor. La disposition et l’emplacement des capteurs ont été déterminés grâce à une étude de l’aérodynamique du quadrirotor et de l’influence des flux d’air de ses rotors.
Tous les composants du système ont été développés, intégrés et testés grâce à une série d’expériences sur le terrain dans une serre réelle. Les principales contributions de cet article sont la validation du quadrirotor comme plateforme de mesure des variables environnementales et la détermination de l’emplacement optimal des capteurs sur un quadrirotor.
PRÉSENTATION DU SYSTÈME
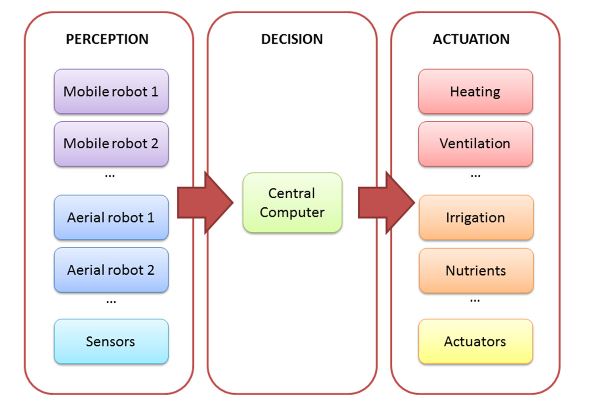
Figure 1. Architecture du système complet
La proposition d’un système sensoriel basé sur un mini-UAV devrait être intégrée dans un système de gestion de l’agriculture en serre (Figure 1). Le premier effectue l’acquisition des variables environnementales qui peuvent être mesurées dans l’air, tandis que le second englobe non seulement la détection (c.-à-d. L’acquisition de toutes les variables environnementales) mais aussi l’actionnement (c.-à-d. Le contrôle du climat, la surveillance des cultures et l’échec détection).
EMPLACEMENT DES CAPTEURS
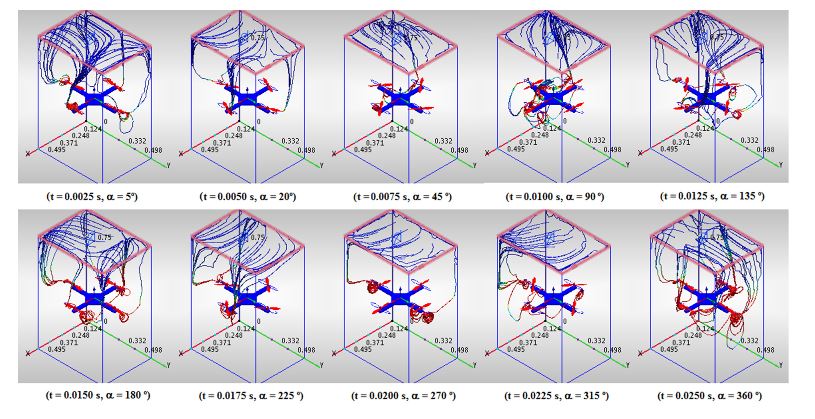
Figure 3. Flux d’air au-dessus du quadrirotor
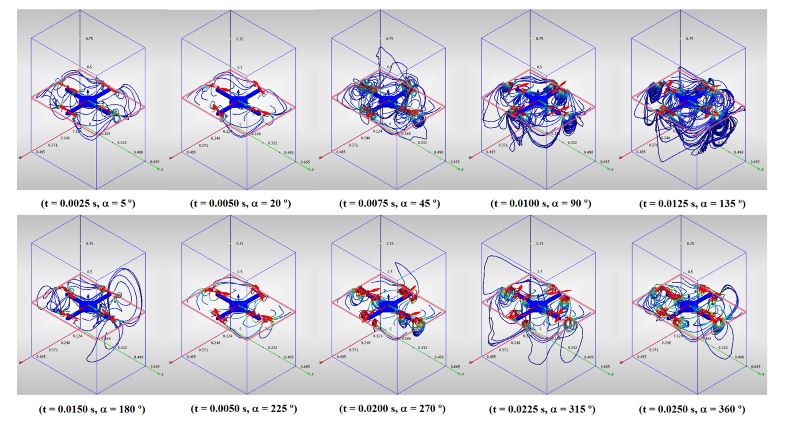
Figure 4. Flux d’air sous le quadrirotor
Les résultats de la simulation CFD sont présentés dans les figures 3–5. Les traces de particules fluides et les profils de vitesse dans les plans ont été choisis pour une meilleure visualisation des résultats afin de les montrer de manière claire et précise tant d’un point de vue qualitatif que quantitatif. Chaque trame est associée à son temps de simulation
EXPÉRIENCES, RÉSULTATS ET DISCUSSION
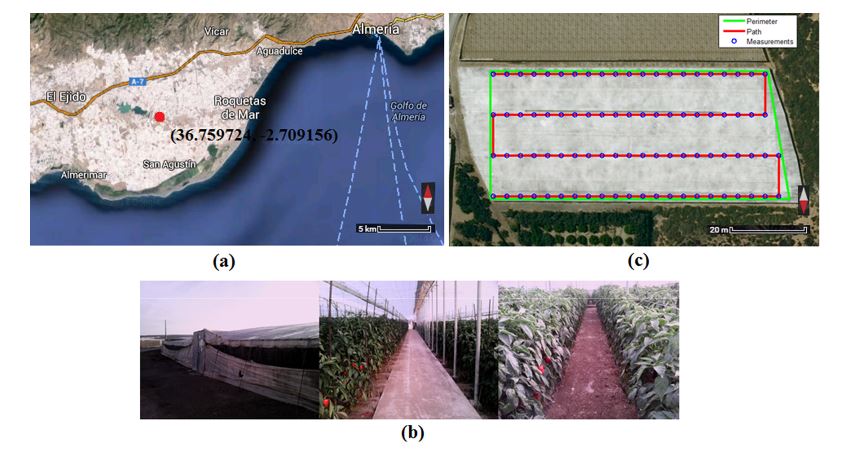
Figure 10. a) La «mer de plastiques» à Almeria (Andalousie, Espagne)
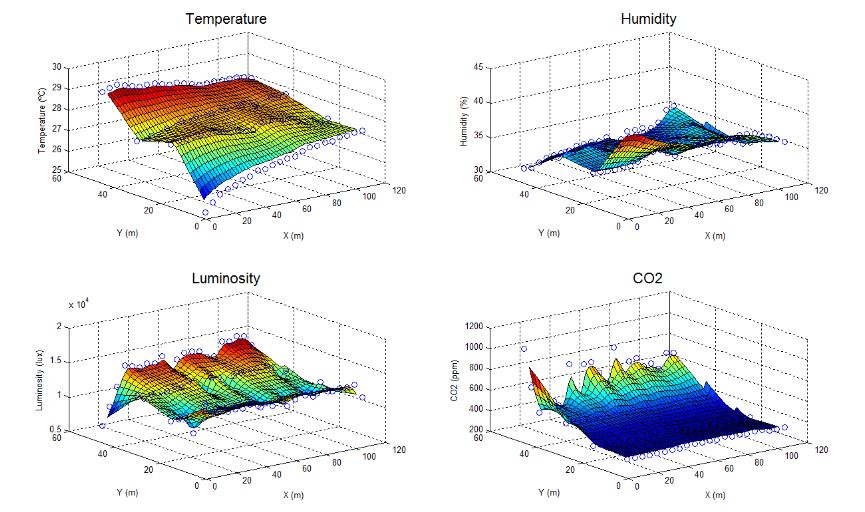
Figure 11. Cartes de température, d’humidité, de luminosité et de CO2 concentration de la serre
Différentes perspectives de la serre (par exemple, extérieur, intérieur, avant et haut) sont illustrées à la figure 10. La surface couverte, les points de mesure et le chemin suivi dans les expériences sont détaillés dans la vue de dessus (figure 10c). Les cartes de température, d’humidité, de luminosité et de concentration de dioxyde de carbone obtenues dans la serre sont représentées sur la figure 11. Les points montrent les mesures des capteurs et les surfaces montrent les interpolations entre ces points.
CONCLUSIONS
Cet article propose un système sensoriel à quadrotor pour mesurer les variables environnementales d’une serre. Contrairement aux réseaux de capteurs sans fil (WSN), aux véhicules terrestres sans pilote (UGV) et à d’autres solutions, les véhicules aériens sans pilote (UAV) peuvent obtenir des mesures à presque n’importe quel point de l’espace tridimensionnel de la serre, ce qui facilite des activités telles que contrôle climatique local et surveillance des cultures.
Les principales contributions de cet article sont la détermination de l’emplacement optimal des capteurs sur le quadrotor et la validation d’un quadrotor comme plateforme de mesure des variables environnementales. Dans un premier temps, une étude exhaustive de l’aérodynamique du quadrirotor a été réalisée afin de déterminer l’allocation optimale des capteurs du quadrirotor. Cette étude a été soutenue par des simulations et des expériences de dynamique des fluides computationnelle (CFD) et a conclu que l’emplacement optimal pour les capteurs est la partie centrale de la face supérieure du quadrotor.
Les résultats de cette étude peuvent être appliqués à différents contextes, y compris la conception d’un quadrotor à haut rendement et la localisation d’autres capteurs et actionneurs. Deuxièmement, une série d’expériences sur le terrain a été réalisée dans une serre pour valider le système sensoriel mini-UAV. Ces expériences ont montré que le système peut collecter les variables environnementales de la serre, y compris les concentrations de gaz ainsi que leur variabilité spatiale et temporelle et d’éventuelles perturbations.
Les différences dans les mesures des capteurs qui peuvent être attribuées à l’influence des rotors ont été limitées; les erreurs relatives étaient inférieures à 4%. Le système permet le contrôle du climat, la surveillance des cultures et la détection des pannes dans une serre et peut être mis en œuvre dans d’autres industries et infrastructures. Enfin, le système peut intégrer d’autres capteurs pour mesurer d’autres gaz tels que CO, CH4, DONC2 ou pas2, si nécessaire.
Source: Université de Madrid
Auteurs: Juan Jesus Roldan | Guillaume Joossen | David Sanz | Jaime del Cerro | Antonio Barrientos