Le système robotique agricole Thorvald II (projet électrique / électronique)
- in Autre Projet
->
ABSTRAIT
Cet article présente une approche novatrice et modulaire des robots agricoles. La production alimentaire est très diversifiée sous plusieurs aspects. Même les fermes qui cultivent les mêmes cultures peuvent différer par la topologie, l’infrastructure, la méthode de production, etc. Les robots modulaires nous aident à nous adapter à cette diversité, car ils peuvent être rapidement configurés pour divers environnements de ferme.
Les robots présentés dans cet article sont modulaires en termes de matériel en ce sens qu’ils peuvent être reconfigurés pour obtenir les propriétés physiques nécessaires pour fonctionner dans différents systèmes de production – tels que les tunnels, les serres et les champs ouverts – et leurs propriétés mécaniques peuvent être adaptées pour s’adapter à la voie largeur, puissance requise, garde au sol, capacité de charge, etc.
Le logiciel du robot se généralise pour fonctionner avec la grande variété de conceptions de robot qui peuvent être réalisées en assemblant des modules matériels dans différentes configurations. L’article présente plusieurs idées novatrices pour la robotique agricole, ainsi que des essais sur le terrain approfondis de plusieurs versions différentes de la plate-forme Thorvald II.
MATÉRIAUX ET MÉTHODES
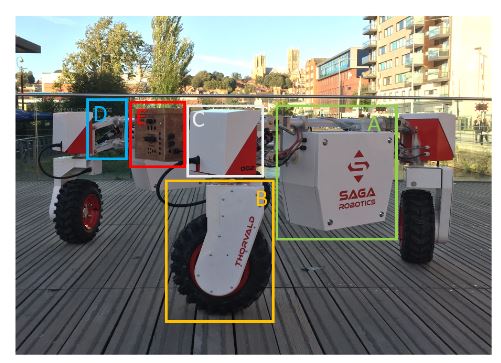
Figure 2. Exemples de modules Thorvald II. A: boîtier de batterie; B: module d’entraînement
Par défaut, tous les modules de boîtier de batterie sont conçus pour servir trois autres modules avec alimentation moteur et communication CAN. Les modules de boîtier de batterie peuvent être équipés de boutons d’arrêt d’urgence pour couper l’entrepreneur sur le bus d’alimentation du moteur. La réinitialisation d’un bouton d’arrêt d’urgence enfoncé ne suffit pas pour rétablir la puissance du moteur. Pour cela, le robot doit recevoir une commande pour réengager l’entrepreneur du bus moteur. Un exemple de boîtier de batterie est illustré à la figure 2.

Figure 4. La configuration standard du Thorvald II
La configuration standard a été utilisée dans diverses applications, telles que le hersage robotisé et l’échantillonnage robotisé du sol, dans plusieurs projets et expériences. Les capacités du robot sur le terrain ont été vérifiées au cours de nombreuses heures d’essais dans divers champs agricoles et dans différentes conditions météorologiques. Le robot est représenté sur la figure 4.
RÉSULTATS

Figure 13. (a) Configuration du variateur différentiel qui ne parvient pas à monter la pente lorsque les modules variateurs sont à l’avant
Avec les roues motrices à l’avant, les configurations 4 et 5 n’ont pas réussi à atteindre le sommet car elles ont toutes deux perdu de la traction au milieu de la pente. Lors de la conduite avec des modules d’entraînement à l’arrière, cependant, les deux configurations 4 et 5 ont pu atteindre le sommet, d’un départ lancé, d’une descente et d’un départ au repos à mi-pente, malgré une perte de traction sporadique. La figure 13 montre certains des robots pendant les tests.
DISCUSSION
Comme indiqué ci-dessus, les modules présentés ont été utilisés pour assembler des robots très différents fonctionnant dans divers environnements. D’après l’expérience des auteurs, le système modulaire réduit considérablement les coûts et le temps de développement liés à la création de nouveaux robots. Ceci est particulièrement utile pour les chercheurs qui ont tendance à opérer dans différents environnements dans différents projets, car les robots peuvent être rapidement adaptés à l’infrastructure agricole existante, puis reconstruits plus tard pour être utilisés dans d’autres fermes.
CONCLUSIONS
Dans cet article, nous avons montré comment les robots modulaires peuvent être un gain de temps lorsqu’il s’agit de s’adapter à de nouveaux environnements. Le fait qu’un robot puisse être modifié sur le terrain signifie que le robot peut être rapidement modifié pour s’adapter à des variables d’environnement nouvelles ou changeantes. Nous avons montré comment les robots basés sur le système Thorvald II sont capables de fonctionner dans plusieurs environnements très différents et donné des exemples d’applications actuelles.
Grâce aux tests sur le terrain, nous avons appris à quel point les cadres flexibles peuvent être une solution pour créer des robots de terrain légers et peu coûteux. C’est quelque chose qui sera approfondi dans nos travaux futurs. Le travail sur le développement ultérieur du matériel et des logiciels pour le système Thorvald II est un processus continu, et de nouvelles configurations du robot continueront d’être créées au fur et à mesure qu’elles sont nécessaires.
Source: Université norvégienne
Auteurs: Lars Grimstad | Pal Johan