Simulation d’un moteur à induction triphasé dans MATLAB avec des méthodes de démarrage direct et progressif (projet électrique / électronique)
- in Autre Projet
->
ABSTRAIT
Les machines asynchrones sont aujourd’hui considérées comme les machines électriques les plus utilisées, principalement utilisées comme moteurs électriques à induction. Le démarrage du moteur à induction est le plus étape importante et dangereuse.
La théorie derrière ce projet est basée sur la représentation du moteur réel par un ensemble d’équations et de valeurs dans MATLAB en utilisant la fonction de sous-système, formant un moteur idéaliste correspondant d’une manière où tous les effets physiques sont similaires.
Le démarrage du moteur à induction est l’étape la plus importante et la plus dangereuse, où les propriétés du moteur jouent un rôle majeur dans l’évaluation de tous les moteurs électriques, et ces propriétés sont définies par les facteurs suivants:
- Couple de démarrage
- Courant de démarrage
- État transitoire
- Douceur du départ
- Simplicité et économie de démarrage
Le moteur est démarré sous différentes charges selon deux méthodes: démarrage direct et démarrage progressif. Chaque méthode est étudiée et discutée en utilisant une simulation de soutien des courbes de courants, de couple, de vitesse, d’efficacité et de facteur de puissance.
UN APERÇU GÉNÉRAL DES MOTEURS À INDUCTION
La structure du moteur à induction 3ph
A. Stator
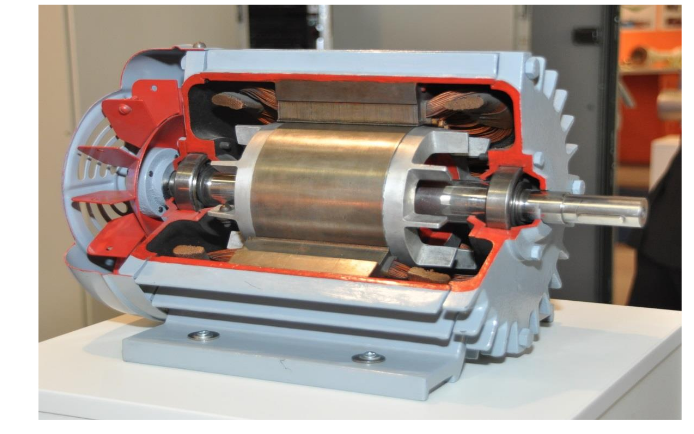
Le stator est formé de plaques minces d’une épaisseur de (0,35 à 0,5 mm) de fer ferromagnétique. Ces plaques sont peintes avant d’être assemblées avec des matériaux isolants pour réduire les pertes par courants de Foucault. La partie interne du stator a une forme cylindrique remplie d’inducteurs en cuivre isolés qui forment les enroulements du stator. Ces enroulements forment un circuit triphasé équilibré connecté en étoile ou en triangle.
Figure 2 .1 Structure du moteur à induction
B. Rotor
Cette pièce est également formée de fines plaques de fer ferromagnétique assemblées entre elles pour former une forme cylindrique qui présente des fentes sur sa surface externe. Comme dans le stator, les bobines du rotor peuvent également être un circuit triphasé ou un circuit multiphasé. Les extrémités des phases des bobines du rotor sont connectées en étoile et fixées sur l’axe de la machine. Les rotors sont triés en fonction du type de leurs bobines en deux types de rotor à cage d’écureuil et de rotor à bague collectrice.
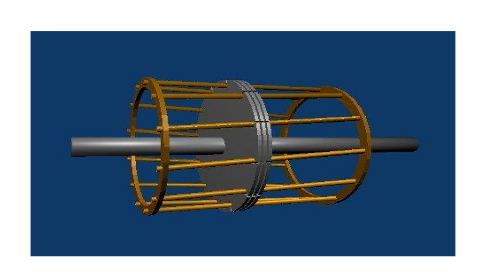
Figure 2.2 Un scage de quare rotor
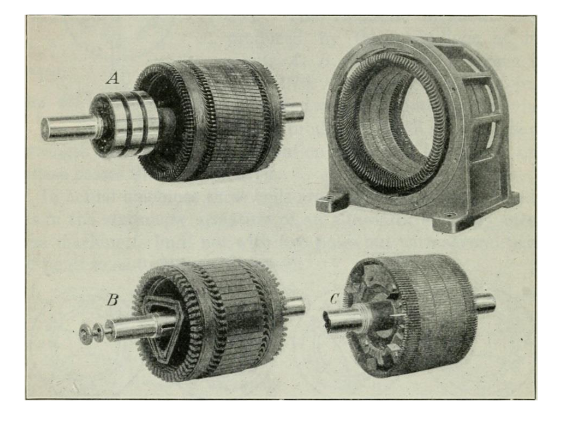
Figure 2.3 Différent type de rotors
LA THÉORIE GÉNÉRALE DES MACHINES ÉLECTRIQUES
Cette théorie est basée sur la représentation de la machine réelle avec une machine idéaliste correspondante d’une manière où tous les effets physiques sont similaires. Cette machine idéaliste est symétrique (a deux pôles et deux phases) et a deux paires d’enroulements identiques sur des axes perpendiculaires à la fois dans le stator et le rotor. Les enroulements sont alimentés par deux courants alternatifs qui sont décalés de (90 °) l’un de l’autre en fonction du temps comme le montre la figure (3.1) La machine idéaliste est traitée comme une machine à deux pôles car la distribution du flux magnétique est répétée après chaque paire de poteaux, peu importe le nombre de poteaux dans la vraie machine.
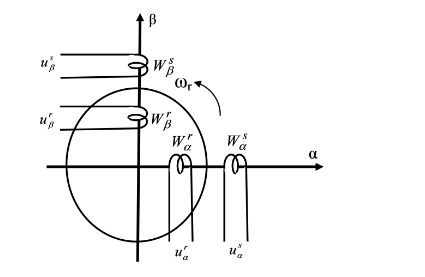
La figure (3.1) Tle circuit machine idéal
SIMULATION ET DÉMARRAGE DU MOTEUR À INDUCTION 3PH DANS MATLAB
Afin de simuler le moteur à induction dans Matlab, les étapes suivantes sont effectuées.
A. Le modèle de moteur à induction
B. Simulation des courbes de départ dans les cas sans charge de charge
C. Méthode de démarrage direct
MÉTHODE DE DÉMARRAGE SOFT
Cette méthode est mise en œuvre en augmentant progressivement la tension appliquée sur le moteur à induction, à partir d’une certaine valeur jusqu’à la tension nominale du moteur. Le processus d’augmentation progressive de la tension est effectué par un régulateur de tension alternative à thyristor triphasé. Le régulateur se compose de six thyristors – deux pour chaque phase – qui sont connectés au moteur comme indiqué sur la figure (5.1). La tension du moteur peut être ajustée en modifiant les angles de déclenchement des impulsions, qui sont appliqués sur les grilles des thyristors. La certaine valeur de tension appliquée sur le moteur est trouvée expérimentalement. C’est la plus petite valeur à laquelle le moteur pourrait démarrer.
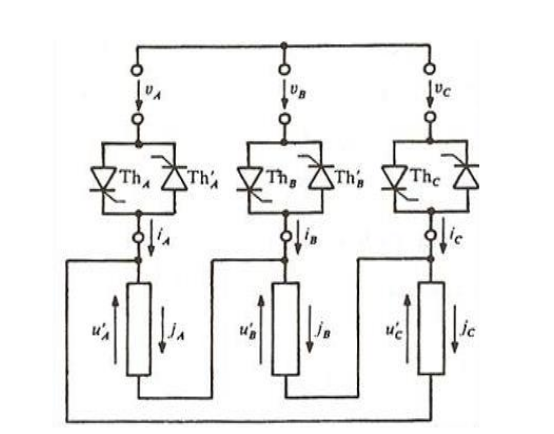
La figure (5.1) Til moteur à induction connecté au thyristor régulateur
CONCLUSIONS ET DISCUSSION
Dans ce chapitre, les résultats des méthodes de démarrage direct et progressif sont mis en évidence et discutés selon les simulations précédentes des chapitres 4 et 5.
Les résultats précédents ont montré que la méthode de démarrage direct nécessite un courant de démarrage important qui provoque une perturbation des tensions sur les lignes d’alimentation. En d’autres termes, le courant de démarrage important produit une forte chute de tension qui affecte le fonctionnement des autres équipements. En dehors de cela, c’est une très bonne méthode car elle fournit un couple de démarrage important dans un état transitoire court, sans avoir besoin d’un équipement externe pour aider à démarrer le moteur.
Les caractéristiques précédentes font de la méthode de démarrage direct la méthode la plus courante pour démarrer un moteur à induction triphasé. La méthode de démarrage progressif nécessite un courant de démarrage raisonnable pour générer un petit couple de démarrage à un long état transitoire, sans parler du besoin d’un régulateur de tension à thyristor externe, ce qui signifie des coûts supplémentaires. D’autre part, il offre un démarrage en douceur sans secousses avec une accélération sans faille contrôlée. Ces caractéristiques confèrent à la méthode de démarrage progressif une précision fiable avec moins de courant nécessaire au détriment du retard de stationnarité et des charges d’équipement externe.
Source: Université de Linnaeus
Auteur: Mohamad Moulham Abboud
>> Liste des sujets du projet Matlab avec PDF gratuit pour les étudiants en mécanique
>> Documents de base des projets Matlab simples pour les étudiants en génie
>> Plus de 200 projets Matlab pour le système de contrôle pour les étudiants de dernière année
>> Plus de 80 projets Matlab basés sur l’électronique de puissance pour les étudiants en génie