Amortisseur à friction variable haute capacité basé sur la technologie de freinage à bande (projet civil)
- in Autre Projet
->
ABSTRAIT
La mise en œuvre de dispositifs d’amortissement contrôlables à haute performance peut améliorer la rentabilité des systèmes structurels pour l’atténuation des risques naturels. Cependant, les applications de ces systèmes d’amortissement sont limitées en raison d’un manque de 1) robustesse mécanique; 2) fiabilité électrique; et 3) une grande capacité de résistance. Pour élargir la mise en œuvre des systèmes d’amortissement modernes, un nouveau dispositif d’amortissement semi-actif est proposé.
Le dispositif, appelé dispositif de friction rotative à bandes (BRFD), a une applicabilité améliorée par rapport aux autres systèmes d’amortissement proposés en raison de sa rentabilité, de ses performances d’amortissement élevées, de sa robustesse mécanique et de sa simplicité technologique. Son principe mécanique est basé sur un frein à bande, qui se traduit par une forte amplification de la force appliquée tout en permettant une force de commande variable. Le modèle théorique du BRFD est présenté et vérifié expérimentalement en soumettant un prototype à différentes charges harmoniques.
Les résultats montrent que le prototype BRFD est capable d’une force maximale de 45 kN (10 kips) en utilisant seulement une force d’actionnement de 267 N (60 lb), offrant ainsi un avantage mécanique de 169. Un modèle dynamique en 3 étapes précédemment développé par les auteurs peut être utilisé avec succès pour modéliser le comportement dynamique du BRFD. Mots clés: Frottement variable, dispositif semi-actif, contrôle structurel, atténuation des vibrations, amortissement supplémentaire, dispositif de friction modifié
DISPOSITIF DE FRICTION ROTATIF À BANDES
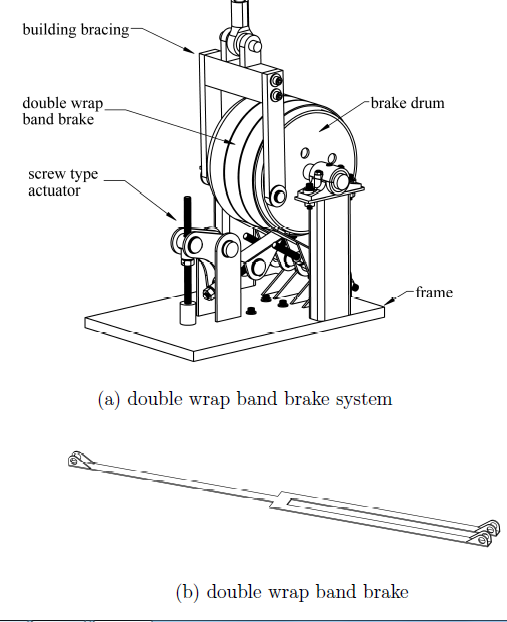
Figure 1: dispositif de friction rotatif à bande.
Un prototype d’une capacité de 45 kN (10 kips) a été fabriqué sur la base du schéma représenté sur la figure 1a. La bande à double enveloppe est illustrée sur la figure 1b. La bande est doublée d’un matériau de friction et enroulée à 670 degrés autour de la circonférence du tambour en acier et ancrée aux deux extrémités. La seule extrémité de la bande est fixée à un mécanisme d’actionnement constitué d’une tige filetée dans le but de faire varier la force appliquée sur le frein à bande, et la double extrémité de la bande est ancrée au cadre rigide.
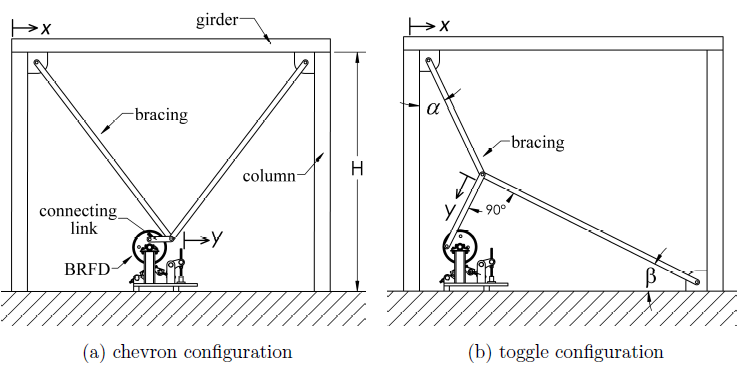
Figure 2: Deux configurations possibles pour le BRFD installé dans le système structurel résistant aux charges latérales d’un bâtiment.
La figure 2 montre le BRFD installé dans deux configurations possibles associées à un système de résistance aux charges latérales de bâtiment. La figure 2 (a) est un système à chevrons qui transforme la dérive interstitielle δ en rotation θ du BRFD via l’ajout d’une liaison de connexion. La figure 2 (b) est une configuration de contreventement à genouillère. Le contreventement à bascule est utilisé dans l’ingénierie du mouvement structurel pour amplifier la dérive interstitielle.
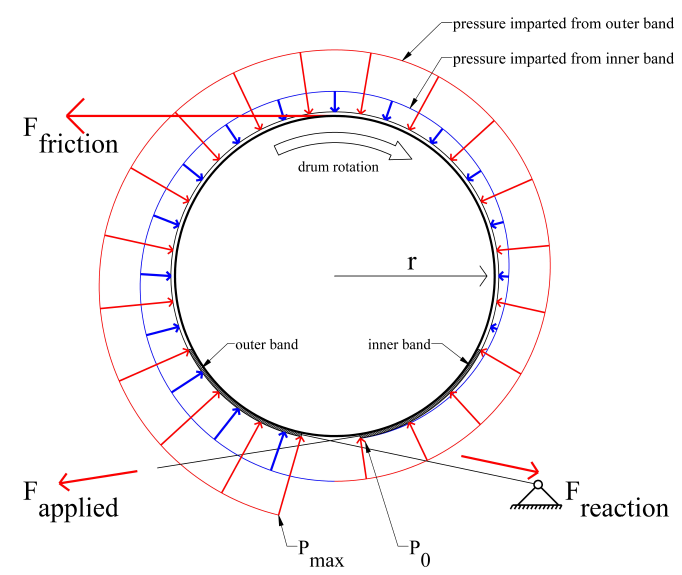
Figure 3: Forces agissant sur le BRFD.
La force de friction du BRFD est générée par le tambour tournant à travers la bande stationnaire. La bande est ancrée à une extrémité (appelée extrémité lâche), où une force d’entrée (Fappliqué) est appliquée à la bande, résultant en une force réactionnaire (Fréaction) à l’extrémité opposée, comme illustré à la Fig.3.Lorsque la rotation du tambour est initiée, une force de friction (Ffriction) est généré en opposition à la rotation du tambour à l’interface entre le matériau de friction et le tambour.
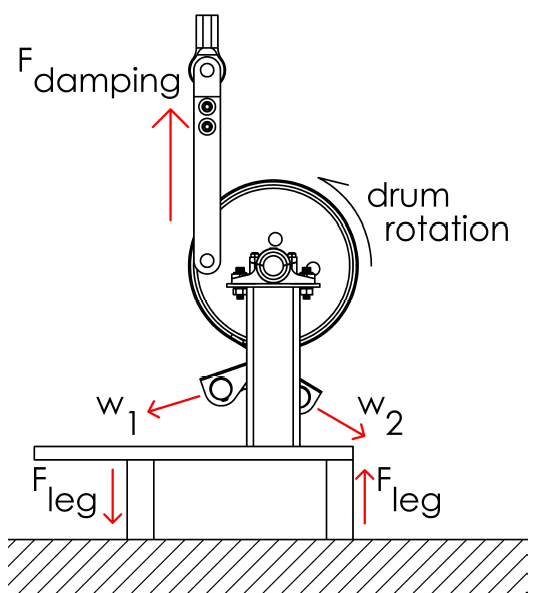
Figure 4: Schéma de la vue latérale du BRFD.
Un schéma de la vue latérale du BRFD est illustré à la Fig.4, où les forces w1 et W2 peut être soit (Fappliqué) ou (Fréaction) en fonction du sens de rotation du tambour. Cette mise en œuvre de conception permet à l’amortisseur de profiter de l’effet d’asservissement positif dans les deux sens de rotation. Le BRFD est conçu pour s’asseoir sur deux pieds de support qui produisent des forces opposées Fjambe qui contrecarre le moment produit par les forces de frottement sur le tambour.
MODÈLE DYNAMIQUE
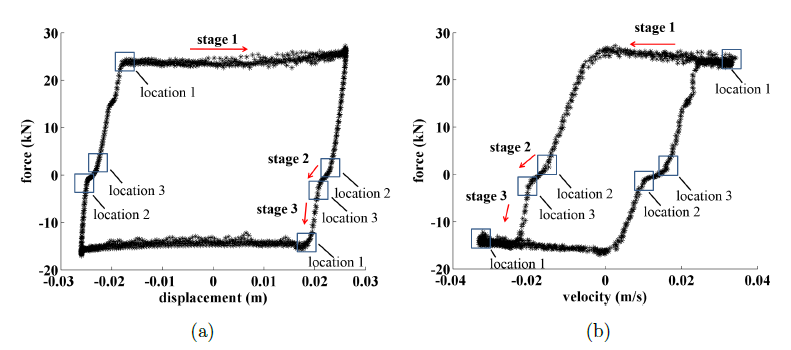
Figure 5: Réponse dynamique du BRFD sous une force appliquée de 133 N (30 lb): (a) réponse hystérétique force-déplacement (0,2 Hz); et (b) réponse hystérétique force-vitesse (0,2 Hz).
Les auteurs ont précédemment proposé un modèle dynamique en 3 étapes basé sur un modèle de LuGre modifié pour caractériser le comportement de frottement de la première génération d’un dispositif d’amortissement rotatif (c’est-à-dire le MFD). Ce modèle dynamique particulier a été utile pour caractériser la baisse de force qui se produit lorsque la rotation du tambour est inversée. Comme il sera observé dans les résultats expérimentaux présentés ici, le BRFD présente toujours une petite baisse de force lors de l’inversion et le modèle dynamique à 3 étages s’applique donc toujours. Ceci peut être observé sur la figure 5 sous «étape 2».
VALIDATION EXPÉRIMENTALE
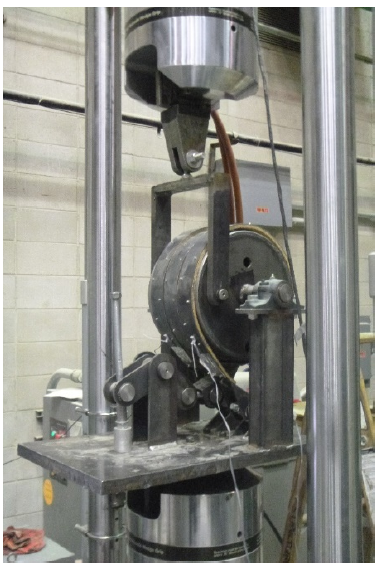
Figure 6: Configuration du test BRFD.
Une cellule de pesée a été placée entre le châssis du BRFD et le mécanisme d’activation pour mesurer les forces appliquées. La force d’amortissement générée par le BRFD a été mesurée via une cellule de charge située dans la tête de la machine d’essai. La configuration de test est illustrée sur la figure 6, avec le BRFD dans sa position complètement non actionnée. Les essais du BRFD ont été limités à sa capacité de force d’amortissement de 45 kN (10 kips).
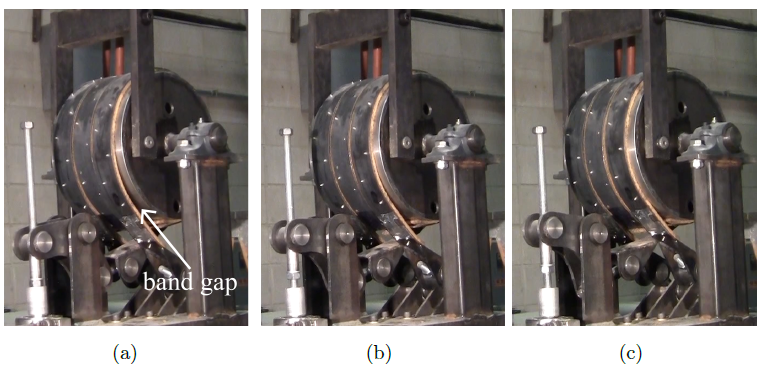
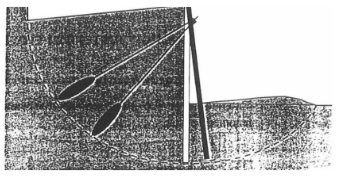
Figure 7: bande interdite variant avec les forces appliquées, (a) 35 N; (b) 66 N; (c) 267 N;
La figure 7 montre le changement de tension de bande pour des forces appliquées de 35, 66 et 267 N. Le changement de force entraîne un changement dans l’espace entre le matériau de friction sur les bandes et le tambour, ce changement de distance est présenté sur la Fig. 7a à 7c. Ces changements sont fonction des forces appliquées à la bande. Ces cadres ont été pris alors que le tambour était en rotation vers l’arrière (sens horaire), où les deux bandes extérieures agissent comme les extrémités fixes ou réactionnaires.
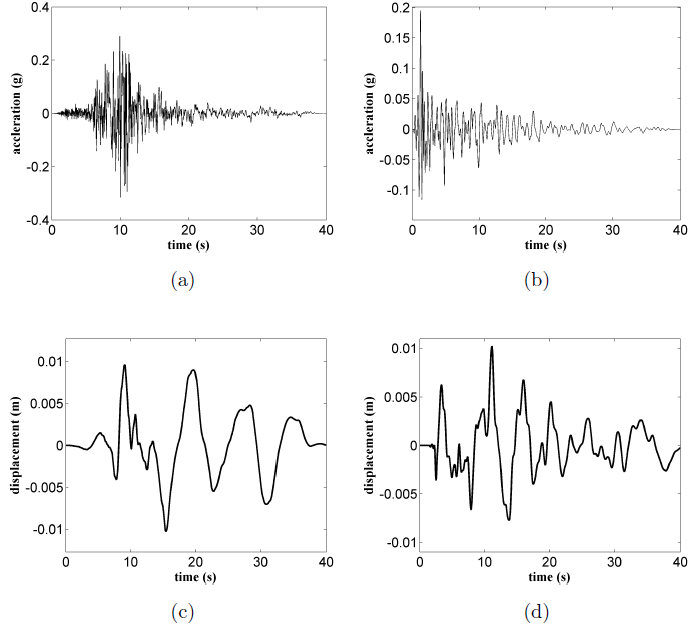
Figure 12: Excitations sismiques.
Figure 12: Excitations sismiques: (a) accélération du sol sans échelle (tremblement de terre de la vallée impériale); (b) accélération du sol sans échelle (tremblement de terre de Hollister); (c) déplacement du sol à l’échelle (tremblement de terre de la vallée impériale); et (d) le déplacement du sol à l’échelle (tremblement de terre de Hollister).
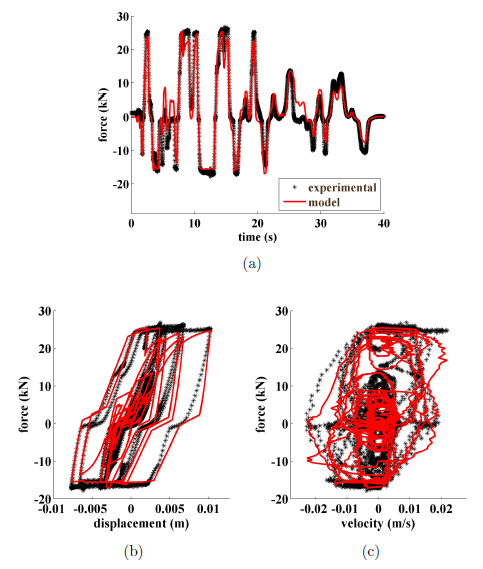
Figure 16: Tremblement de terre de Hollister à 133 N (30 lb): (a) historique temporel de la force d’amortissement; (b) boucle de déplacement de force; et (c) boucle force-vitesse.
Il y a une bonne correspondance du modèle théorique avec les données expérimentales pour les deux forces appliquées. Un écart correspondant est clairement observable sous le tremblement de terre de Hollister à environ 25 secondes (Fig. 16 (a)). Ceci est dû à une approximation linéaire de la force d’amortissement pendant un changement de la direction de rotation du tambour où un jeu est présent. Ce dépassement est également présent dans la réponse de la vallée impériale et peut être observé à une faible magnitude à environ 14 s.
RÉSUMÉ ET CONCLUSIONS
Dans cet article, un nouvel amortisseur à friction variable pour les applications de contrôle structurel a été présenté. Le dispositif, appelé dispositif de friction rotative à bandes (BRFD), est basé sur la technologie de freinage à bande bien acceptée et mature. Cela fait du BRFD un système d’amortissement semi-actif mécaniquement robuste. Il est capable de fournir des forces d’amortissement importantes avec une force appliquée sensiblement plus faible en raison de son effet d’asservissement positif.
Un prototype du BRFD a été fabriqué et validé expérimentalement. Les essais dynamiques ont été effectués sous des charges harmoniques à différentes fréquences et forces appliquées. Les résultats montrent que le prototype BRFD est capable de produire une force d’amortissement maximale de 45 kN (10 kips). Un modèle dynamique en 3 étapes a été introduit et les paramètres du modèle ont été identifiés en fonction des résultats des tests.
Les résultats montrent que le modèle pourrait être utilisé pour modéliser avec précision le comportement dynamique de l’appareil. L’avantage mécanique expérimental démontre que le dispositif était capable d’une amplification de force de l’ordre de 125 à 150 fois la force appliquée. Ces chiffres montrent un accord avec les valeurs théoriques. Le dispositif proposé et son modèle sont ensuite validés à l’aide d’excitations non stationnaires constituées de deux séries chronologiques de séismes. Les résultats ont démontré que le BRFD se comporte comme prévu sous des excitations non stationnaires.
Le prototype et le modèle de friction validés présentés dans cette recherche font progresser le potentiel de mise en œuvre de dispositifs de friction semi-actifs. Le BRFD est la deuxième génération de systèmes d’amortissement rotatifs conçus par les auteurs. Il a été spécialement conçu pour minimiser l’effet de jeu et augmenter la force d’amortissement maximale d’un ordre de grandeur. Les résultats ont montré que le BRFD a réussi à atteindre ces deux objectifs, ce qui en fait un appareil mécaniquement robuste capable de force de frottement variable élevée.
Source: Université d’État de l’Iowa
Auteurs: Austin R.J. Downey | Liang Cao | Simon Laflamme