Pulvérisateur de pesticides semi-automatique à énergie solaire pour une utilisation dans les vignobles (projet électronique)
- in Autre Projet

->
ABSTRAIT
Cet article présente un système de pulvérisation de pesticides semi-automatique fonctionnant à l’énergie solaire. Le pulvérisateur semi-automatique est un véhicule à trois roues qui pulvérise des pesticides dans n’importe quel vignoble donné avec une assistance humaine presque nulle. Le véhicule est alimenté par une batterie solaire embarquée, ce qui réduit les coûts de fonctionnement. L’énergie solaire est d’abord utilisée pour charger une batterie d’accumulateurs.
L’énergie solaire stockée dans la batterie est utilisée pour faire fonctionner le moteur qui fonctionne comme une pompe. Dans ce projet, nous essayons de faire un modèle prototype pour les agriculteurs et les cultivateurs pour qui la pulvérisation d’insecticides est nocive et dangereuse. Le contrôle du véhicule est réalisé à l’aide d’une unité de microcontrôleur intégrée qui est programmée pour répondre au dispositif sans fil zigbee.
MÉTHODES
Fig.1 Spray de compression pour les mains.
Les pulvérisateurs manuels à compression sont du type à maintien de pression ou sans maintien de pression. Le type de maintien de la pression présente l’avantage que l’air chargé une fois peut durer des semaines, mais nécessite un réservoir robuste et une pression élevée, par conséquent, ils ne sont pas d’usage courant. Le type de retenue sans pression est le pulvérisateur à compression manuel le plus couramment utilisé.

Fig.2 Pulvérisateur Power Tiller.
Le pulvérisateur électrique se compose d’un réservoir de pulvérisation intégré ou externe; une pompe à piston haute pression généralement alimentée par un moteur à essence, une soupape de régulation de pression et un tuyau d’une longueur maximale de 50 m. Les réservoirs de pulvérisation sont trop grands pour être transportés comme sac à dos. Le pulvérisateur de puissance est produit dans un certain nombre de versions.
PORTÉE DE LA RECHERCHE
Robots de service autonomes pour vergers et vignobles: environnement de simulation 3D de navigation et applications multi-capteurs Linz, A. Ruckelshausen et E. Wunder. Les auteurs travaillent dans les domaines des robots de terrain autonomes sans pilote ou télécommandés, de la navigation, de la fusion de capteurs basés sur l’image ainsi que des applications agricoles. Au sein d’un groupe de recherche interdisciplinaire, ces technologies sont transférées vers des applications robotiques dans les vignobles et les vergers.
L’objectif est la disponibilité d’un robot de service autonome, alors que les premières applications sont la protection des plantes spécifique au site (par exemple, pulvérisation précise), le paillage et la cueillette de boîtes de fruits. Une première version du robot avec entraînements électriques et pulvérisateurs précis a déjà été développée. Les applications, cependant, montrent une large gamme de conditions de terrain qui doivent être prises en compte pour la conception de l’application du véhicule. Ainsi les auteurs ont développé un environnement de simulation 3D qui permet le test virtuel de la plateforme robotique avant son application.
MÉTHODOLOGIE ET DISCUSSION PROPOSÉES
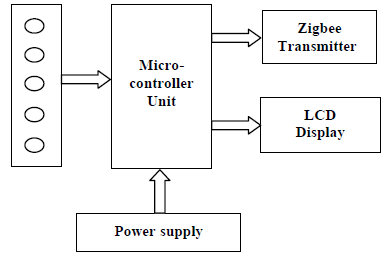
Fig. 3.1 Schéma fonctionnel de l’émetteur.
Fig.3.2 Schéma fonctionnel du récepteur.
Le système proposé de pulvérisateur automatique de pesticides qui devrait obtenir de meilleurs résultats par rapport aux méthodes précédentes sans aucune assistance humaine. Ce serait un modèle mécanique semi-automatique qui fonctionnerait automatiquement alimenté par l’énergie solaire et réduirait la corvée et protégerait également les agriculteurs et les cultivateurs des pesticides et produits chimiques nocifs. Le système proposé nécessite des capteurs IR, des pilotes de moteur, un émetteur et un récepteur Zigbee et un contrôleur comme blocs principaux pour la conception.
CONCLUSIONS
Ce projet démontre la mise en œuvre de la robotique et de la mécatronique dans le domaine de l’agriculture. Ceci étant un modèle d’essai, la robustesse du véhicule n’est pas très élevée. Les performances sont satisfaisantes dans des conditions de laboratoire. Le modèle a donné un taux de couverture de zone assez bon et le coût de fonctionnement tel que calculé était également raisonnablement bas. En outre, la sécurité et la santé à long terme des agriculteurs sont assurées en éliminant complètement le travail humain de ce processus. Il ne compromet pas les performances d’un pulvérisateur de pesticides à base d’essence.
La portée future de ce projet comprend:
- Commencez à construire un prototype à grande échelle qui peut être utilisé sur le terrain en temps réel.
- Facilitez le chargement de la batterie à l’aide d’un chargeur solaire, réduisant ainsi encore plus les coûts.
- L’énergie de la batterie peut être économisée en utilisant le schéma PWM pour entraîner la pompe.
Source: Université technologique de Visvesvaraya
Auteurs: Ahalya M | Muktha A | Veena M | Vidyashree G | Rehna V J
>> Plus de projets d’énergie sans fil pour les étudiants de dernière année
>> Plus de projets sans fil utilisant Zigbee pour les étudiants en génie
>> Plus de projets sans fil utilisant un microcontrôleur pour les étudiants en génie